
In case of affine transformations, it's easier to work directly with matrices. First, we need a function to transform a matrix into the required syntax of option transform:
matrix_to_transform_format (m,[vars]) :=
block([prod, lv: length(vars)],
if not member(lv, [2,3]) or
not every (atom, vars) or
not matrixp(m) or
length(m) # length(first (m)) or
length(m) # lv + 1
then error("Illegal definition of variables")
else prod : m . transpose(endcons(1,vars)),
append(makelist(prod[k,1], k, 1, lv),
vars) )$
Let's now define some affine 2D transformation matrices:
/* Rotation of angle th */
rotation(th) := matrix([cos(th),-sin(th),0],[sin(th),cos(th),0],[0,0,1])$
/* Scaling with factors k1 and k2 */
scale(k1,k2) := matrix([k1,0,0],[0,k2,0],[0,0,1])$
/* Translation with respect to vector (u,v) */
translation(u,v) := matrix([1,0,u],[0,1,v],[0,0,1]) $
/* Reflection through x-axis */
reflection_x() := matrix([1,0,0],[0,-1,0],[0,0,1])$
/* Reflection through y-axis */
reflection_y() := matrix([-1,0,0],[0,1,0],[0,0,1])$
/* Reflection through the straight line which passes
through point (p1,p2) with direction vector (u1,u2) */
reflection_line(u1,u2,p1,p2) :=
block([th:atan2(u2,u1)],
translation(p1,p2) .
rotation(th) .
reflection_x() .
rotation(-th) .
translation(-p1,-p2)) $
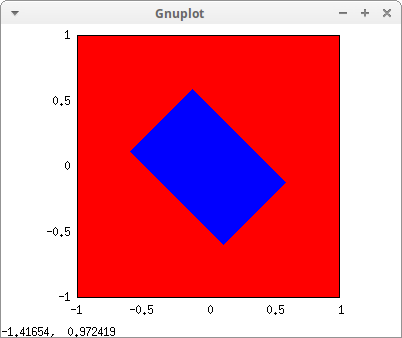
Scaling and rotating a square:
quad : rectangle([1,1],[-1,-1]) $
draw2d(
proportional_axes = 'xy,
/* original red square */
quad,
transform = matrix_to_transform_format (
rotation(%pi/4) . scale(1/3, 1/2),x,y),
fill_color = blue,
/* transformed blue rectangle */
quad ) $
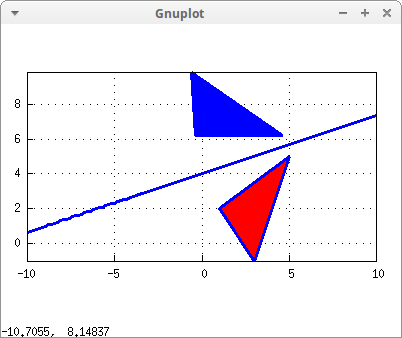
Reflecting a triangle through an arbitrary axis:
tri : triangle([1,2], [5,5], [3,-1]) $ /* the symmetry axis is the straight line with director vector (3,1) passing through point (0,4), whose equation is y = 4 + x/3 */ draw2d( proportional_axes = xy, line_width = 3, grid = true, tri, explicit(4 + x/3,x,-10,10), transform = matrix_to_transform_format (reflection_line(3,1,0,4),u,v), tri )$
An example in 3D. Rotating a cylinder around an arbitrary axis:
/* Rotation of angle th around axis passing through point p=[p1,p2,p3]
with direction vector u=[u1,u2,u3] */
rotation3d(th,u,p) :=
block([c,s,t,n],
c : cos(th),
s : sin(th),
t : 1 - c,
n : u / sqrt(apply("+", u^2)),
matrix(
[t*n[1]^2+c, t*n[1]*n[2]-s*n[3], t*n[1]*n[3]+s*n[2], p[1] ],
[t*n[1]*n[2]+s*n[3], t*n[2]^2+c, t*n[2]*n[3]-s*n[1], p[2] ],
[t*n[1]*n[3]-s*n[2], t*n[2]*n[3]+s*n[1], t*n[3]^2+c, p[3] ],
[0, 0, 0, 1] ))$
set_draw_defaults(
xrange = [-5,5], xlabel = "x",
yrange = [-5,5], ylabel = "y",
zrange = [-5,5], zlabel = "z",
proportional_axes = xyz,
xyplane = 0,
points_joined = true) $
/* graphic objects */
cylinder : tube(0,3,a,1,a,-2,2) $
rotation_axis : points([[0,1,4],[0,-1,-4]]) $
rotated_cylinders :
makelist(
gr3d(
view = [60,5*k], /* we also rotate our point of view */
rotation_axis,
cylinder, /* original cylinder */
transform = matrix_to_transform_format(
rotation3d(k*2*%pi/15,[0,1,4],[0,0,0]), x,y,z),
color = red,
enhanced3d = true,
cylinder),
k,0,15) $
draw(
dimensions = [400,400],
delay = 20,
terminal = animated_gif,
rotated_cylinders )$
© 2011-2016, TecnoStats.